Project:
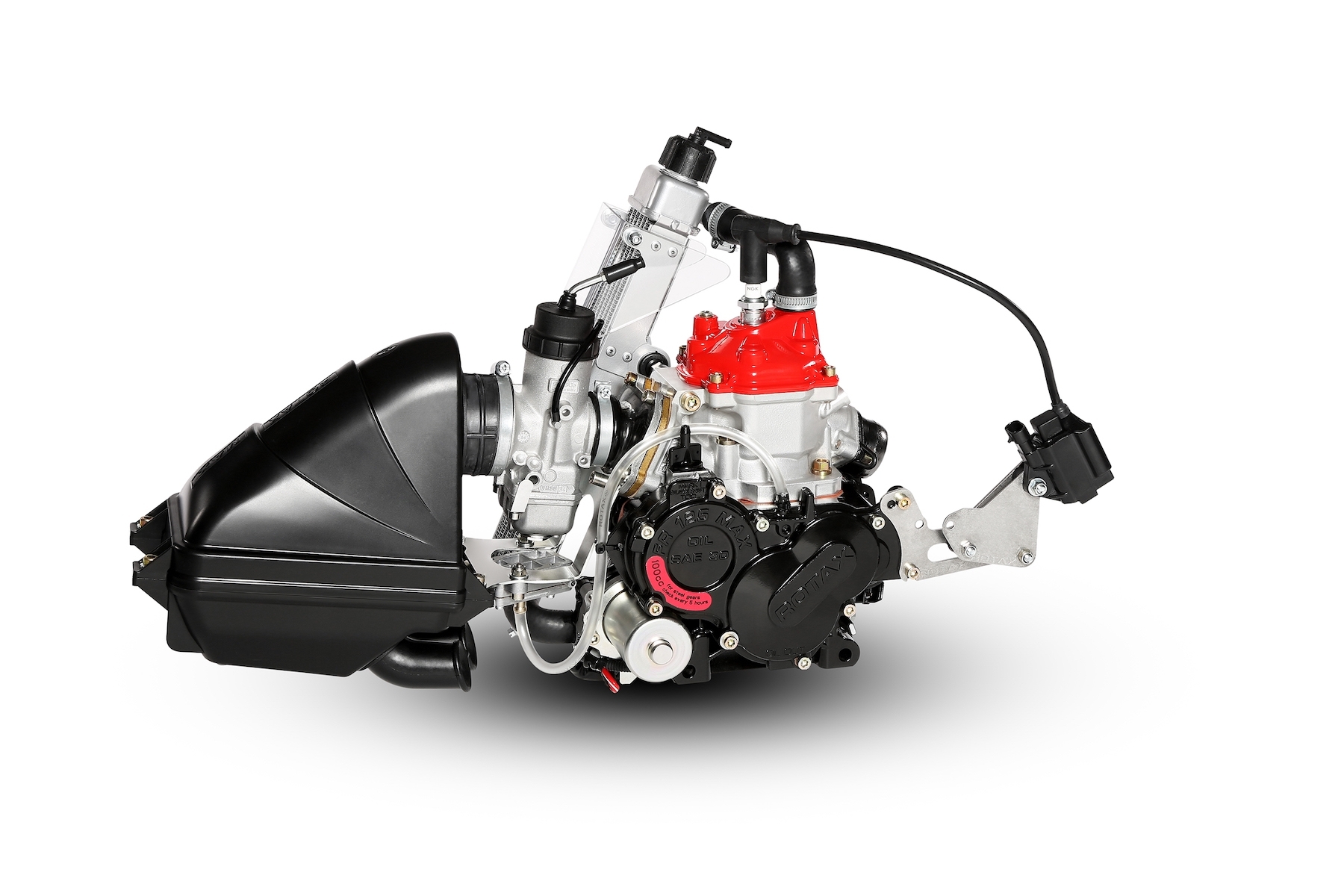
Amidst the intricate domain of marine technology, our project focuses on decoding Electronic Control Unit (ECU) communications utilizing the CanController, a specialized hardware device, in tandem with the versatile SavvyCAN open-source firmware. This collaborative effort seeks to decode and analyze CAN-bus communications from commercial ECUs, providing profound insights into the proprietary language governing vehicle electronic systems.
Data Interception:
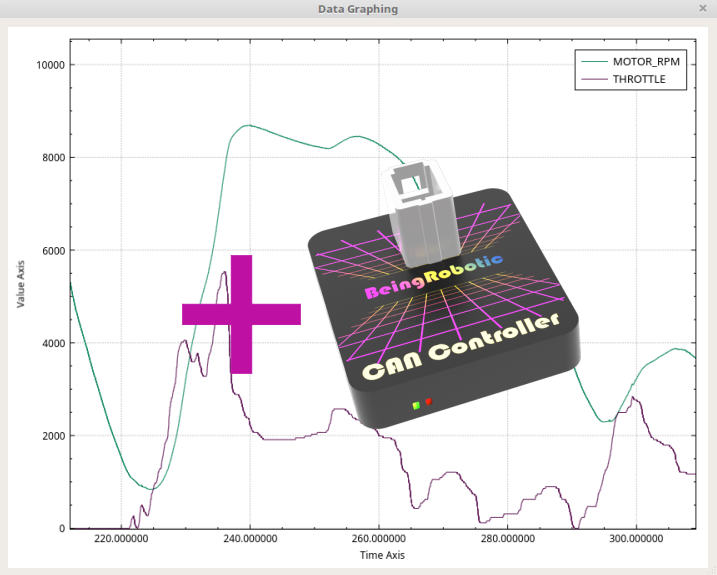
Implemented using CanController to efficiently intercept and capture packets transmitted by marine ECUs within a vessel's network.
Decoding Algorithm:
Develop a decoding algorithm, harnessing the capabilities of the CanController and use SavvyCAN software, to interpret and translate captured data into human-readable information.
Data Analysis:
Conduct a comprehensive analysis of the decoded data to identify patterns, communication protocols, and specific messages exchanged between marine ECUs.
Interaction with ECU:
Explore the potential for interaction with the ECU post-acknowledgment, enabling control over variables such as trim position and motor power within the maritime context.